Proyecto actual: robot móvil autónomo
Este proyecto integra control de motores BLDC, lectura de sensores y arquitectura ROS2 para construir una base móvil robusta y escalable. Estoy validando cada módulo sobre hardware real, con iteraciones rápidas para mejorar estabilidad, precisión y seguridad.
Video del proyecto
Galería del proyecto
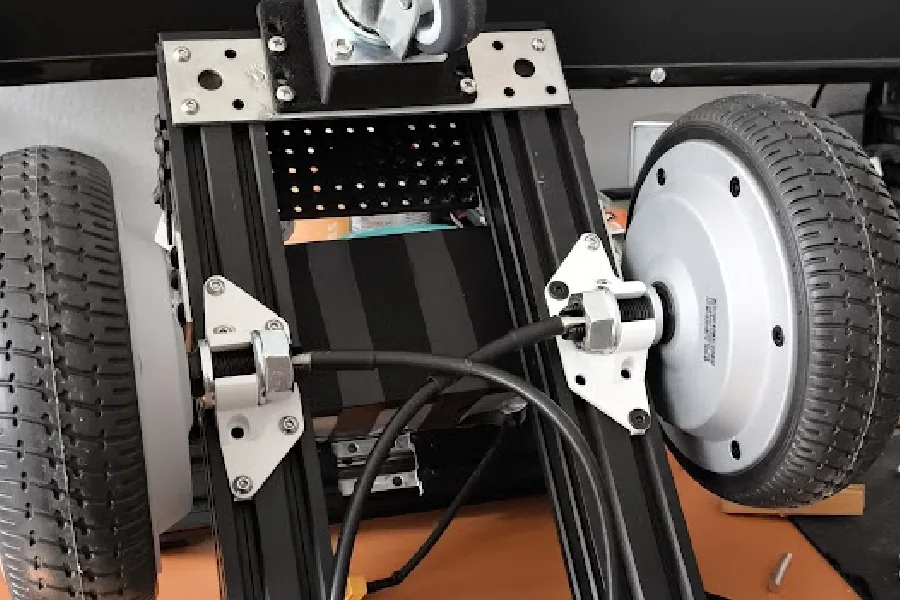
Control de motores en banco
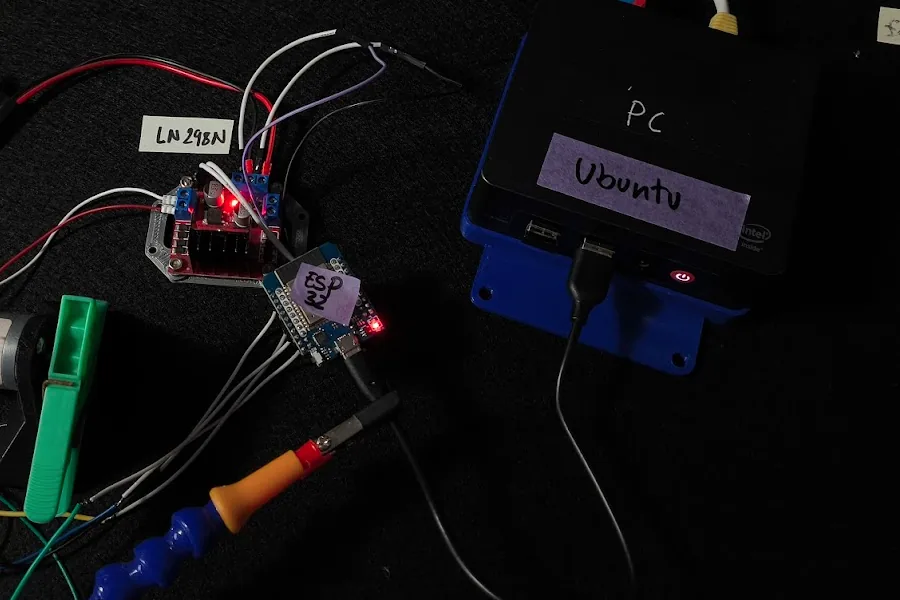
Integración de sensores
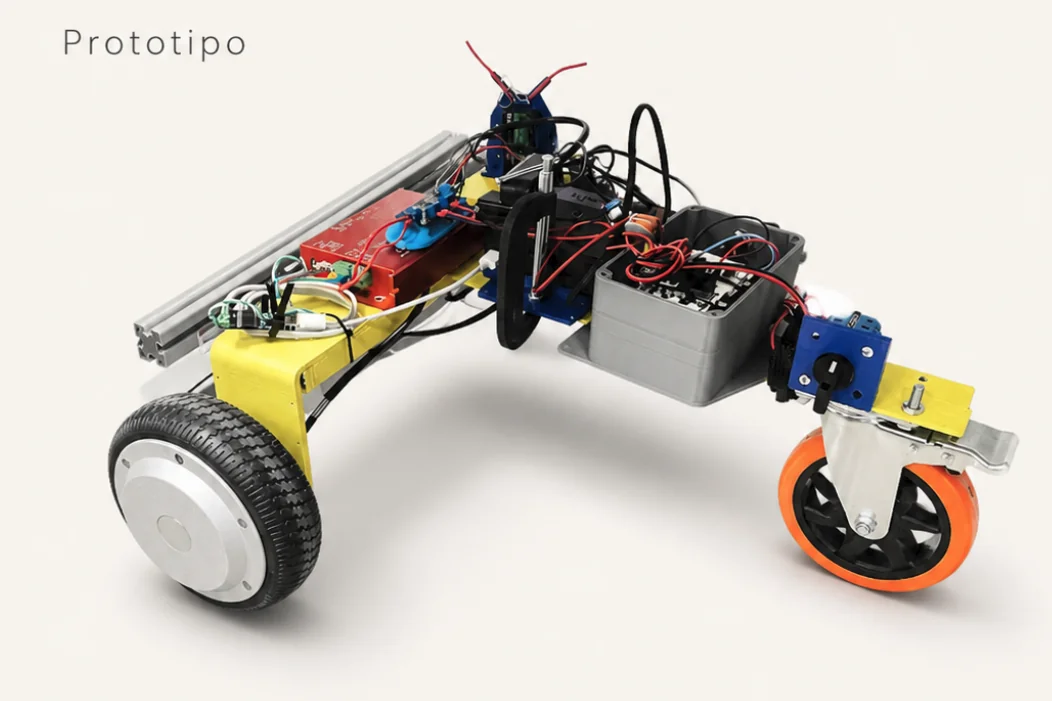
Prototipo robot móvil

Arquitectura y pruebas en hardware