Ingeniería aplicada a robótica real.
Electrónica, firmware y software funcionando en hardware real.




Proyecto actual
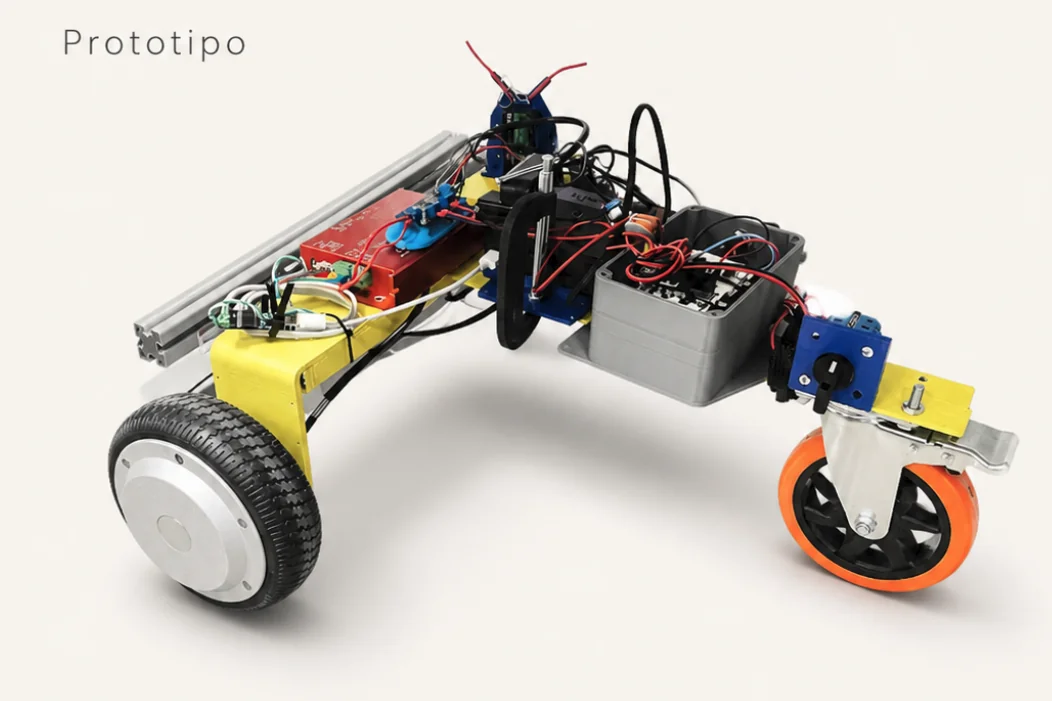
Estoy desarrollando un robot móvil desde cero, integrando control de motores, sensores y arquitectura completa en ROS2.
Areas de Interes
Desarrollo sistemas completos de robótica, desde electrónica y control hasta software en ROS2. Todo probado en hardware real, iterando rápido y validando cada paso.
Sistemas completoshardware + software
6áreas técnicas integradas
Validaciónen hardware real
Stack principal
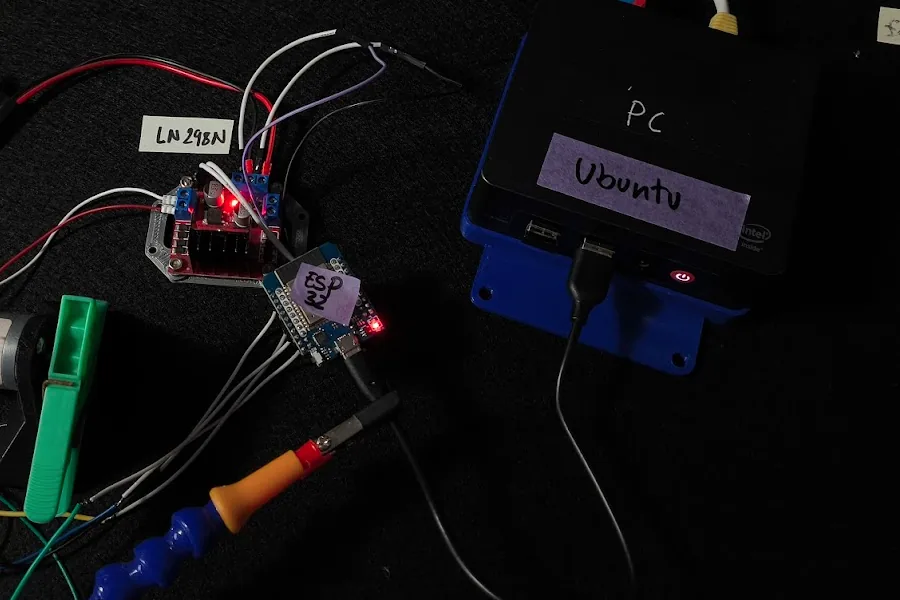
Tecnologías principales: ROS2, Python, C/C++, ESP32, CAN y diseño 3D para prototipos funcionales.
Ejemplos de sistemas en desarrollo
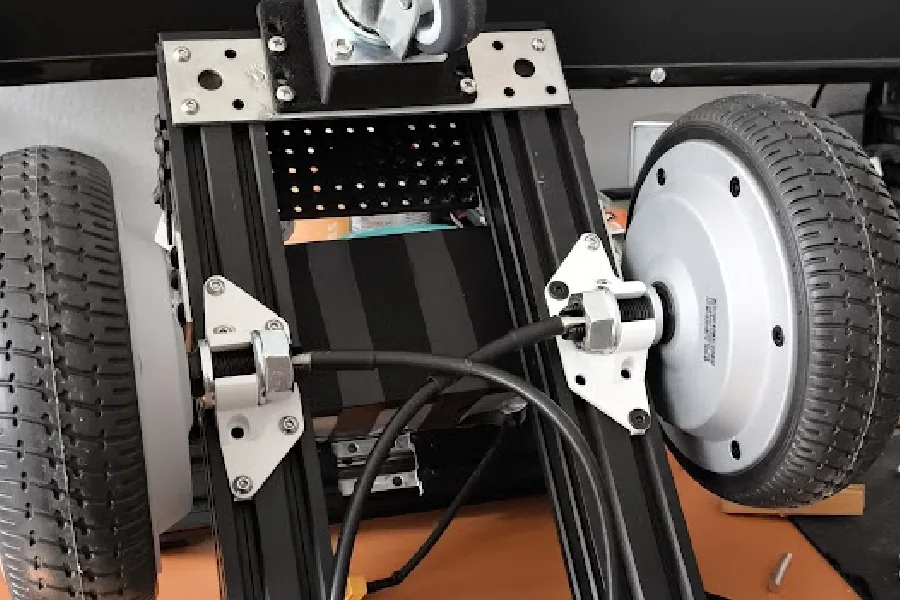
Control de motores en banco
Integración de sensores
Prototipo robot móvil

Arquitectura y pruebas en hardware