





Mini Robot
Robot Diferencial con ROS2
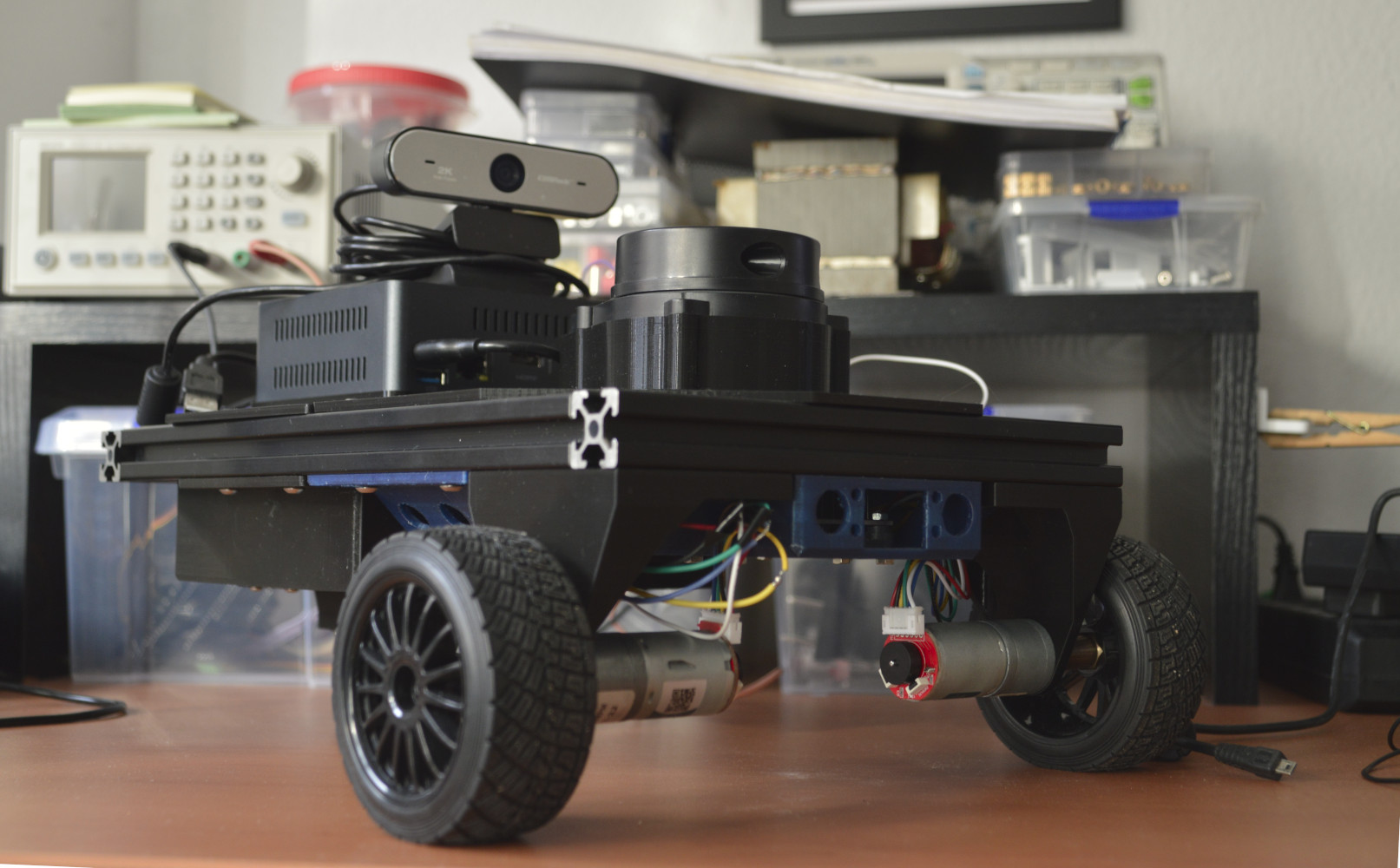
La construcción de un robot diferencial puede ser una excelente manera de aprender sobre robótica, desde la mecánica y electrónica hasta la programación y control. Además es una plataforma de pruebas versátil y fácil de construir que se puede utilizar para experimentar con diferentes sistemas de control y sensores.
Características
una estructura robusta y está equipado con una batería y un mini PC para procesar datos y controlar los motores. Además, cuenta con nodos ROS para integrar diferentes componentes del robot y una webcam para la percepción visual.
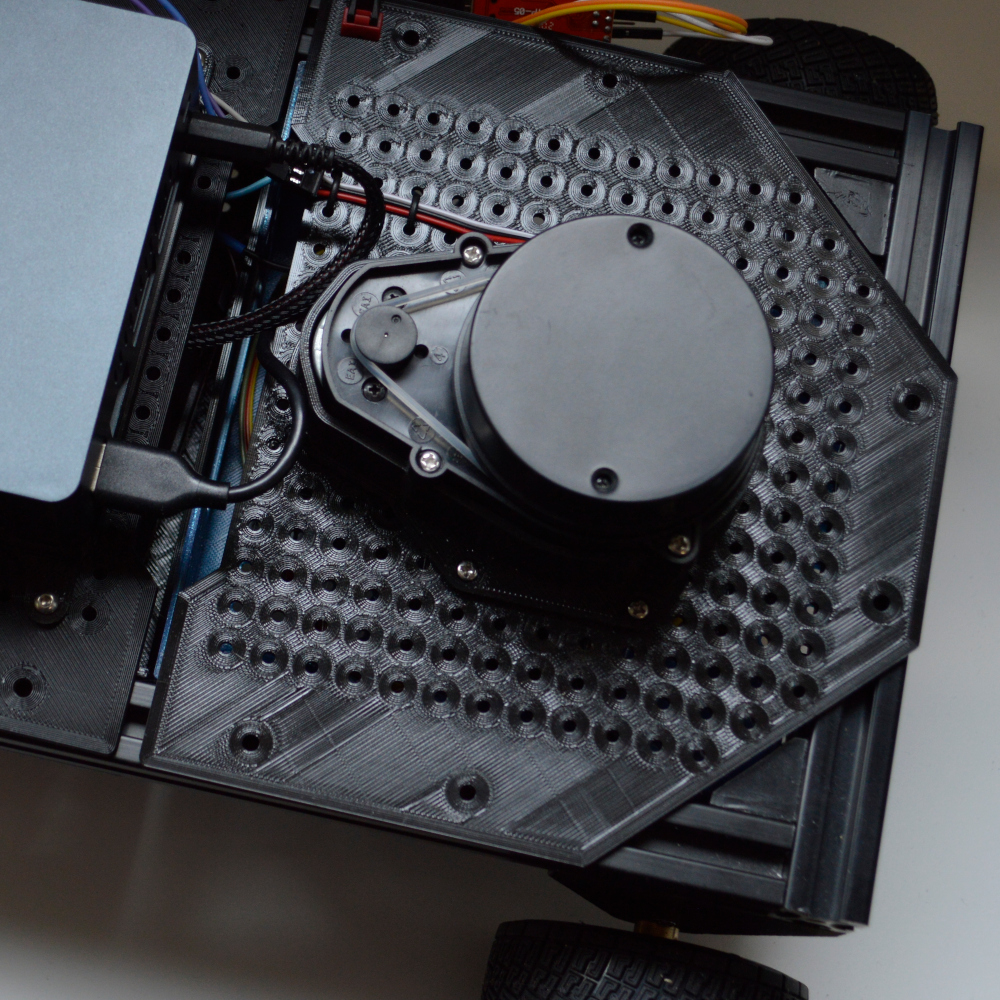
LiDAR
El LiDAR (Light Detection and Ranging) permite al robot obtener información detallada y precisa del entorno mediante la emisión de pulsos láser y la detección del tiempo de retorno de los mismos. Gracias a esto el robot es capaz de detectar obstáculos, medir distancias y crear un mapa detallado del entorno en tiempo real.
Aplicaciones para pruebas de sensores y algoritmos
Navegación autónoma: Navegación de manera autónoma en un entorno determinado, utilizando el LiDAR y otros sensores para evitar obstáculos y llegar a un destino específico.
Control de movimiento: Pruebas de control de movimiento, donde se pueden probar diferentes algoritmos de control para lograr un movimiento suave y preciso.
Análisis de datos: Recolección de datos y análisis, donde se pueden probar diferentes algoritmos de procesamiento de datos y aprendizaje automático.